[영어공부] 곤충 만한 내연기관 로봇
Soft Robot Walks by Repeatedly Blowing Itself Up. Rapid explosive actuation powers this insect-scale robot’s jumps
EVAN ACKERMAN, 14, SEP. 2023, https://spectrum.ieee.org/explosive-robot-insect
로봇의 동력원으로 전기를 먼저 떠올릴 테지만 사실 화학연료를 따라가진 못합니다. 전기 배터리는 조용하고 각종 전자장치에 잘 어울리긴 하지만 화학연료에 비해 에너지 밀도를 따지면 한참 모자랍니다. 게다가 작게 만드는데 한계가 있습니다.
It’s hard to beat the energy density of chemical fuels. Batteries are quiet and clean and easy to integrate with electrically powered robots, but they’re 20 to 50 times less energy dense than a chemical fuel like methanol or butane. This is fine for most robots that can afford to just carry around a whole bunch of batteries, but as you start looking at robots that are insect-size or smaller, batteries simply don’t scale down very well. And it’s not just the batteries—electric actuators don’t scale down well either, especially if you’re looking for something that can generate a lot of power.
9월 14일자 사이언스지에 내연기관을 사용하는 곤충 크기의 로봇이 소개 됐습니다. [ Powerful, soft combustion actuators for insect-scale robots, https://www.science.org/doi/10.1126/science.adg5067 ]
작은 연소통에 가스(부탄)를 충전하여 폭발 시키면 고탄성 고무막(elastomer)이 순간적으로 부풀어 힘을 내게 되는 구조 라고 합니다.
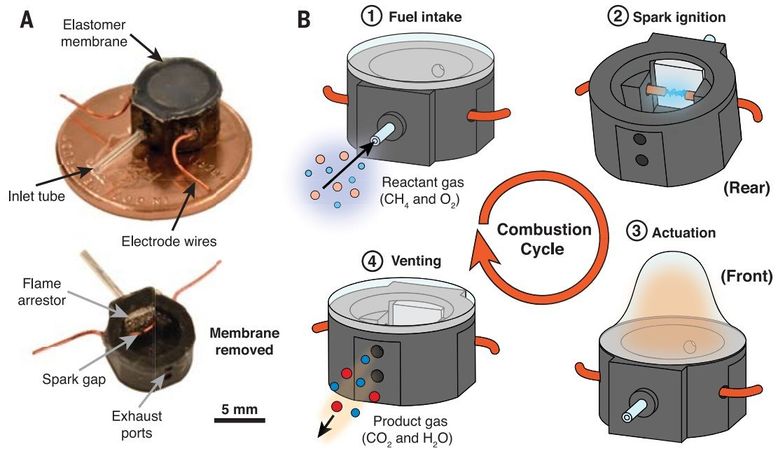
엔진의 무게는 325 미리그램으로 초당 100회의 폭발을 내면서 약 9.5 뉴턴의 힘을 냅니다. 고무막의 탄성이 관건인데 약 75만회의 진동을 견딘다고 하네요.
"It took a lot of care, iterations, and intelligence to come up with this steerable, insect-scale robot," Shepherd told us. "Does it have to have legs? No. It could be a speedy slug, or a flapping bee. The amplitudes and frequencies possible with this system allow for all of these possibilities. In fact, the real issue we have is making things move slowly."
폭발 주기를 (천천히) 조절 하는 것이 관건이라고 합니다.
Getting these actuators to slow down a bit is one of the things that the researchers are looking at next. By trading speed for force, the idea is to make robots that can walk as well as run and jump. And of course finding a way to untether these systems is a natural next step. Some of the other stuff that they’re thinking about is pretty wild, as Shepherd tells us: "One idea we want to explore in the future is using aggregates of these small and powerful actuators as large, variable recruitment musculature in large robots. Putting thousands of these actuators in bundles over a rigid endoskeleton could allow for dexterous and fast land-based hybrid robots." Personally, I’m having trouble even picturing a robot like that, but that’s what’s exciting about it, right? A large robot with muscles powered by thousands of tiny explosions—wow.
대형 로봇에 순간적인 힘을 내는 근육에 적용하고 싶다고 합니다.
댓글 없음:
댓글 쓰기